赛道介绍
智能 "+" 赛道介绍¶
智能 "+" 赛道有物流小车和生活垃圾分类两个赛项
我参加的是 生活垃圾分类 ,所以此赛项做注意指导说明,对于 物流小车 也了解一些做简单介绍提一些意见。
物流小车¶
阅读声明: 本人并不是参加的这个赛道,我以自己国赛、市赛见到的很多优秀小车方案做一个推荐,也有一些自己的见解,因为对规则研究并不是很多所以有不恰当的地方多多包含。
赛项简介¶
首先看一下 作品要求:

比赛场地:
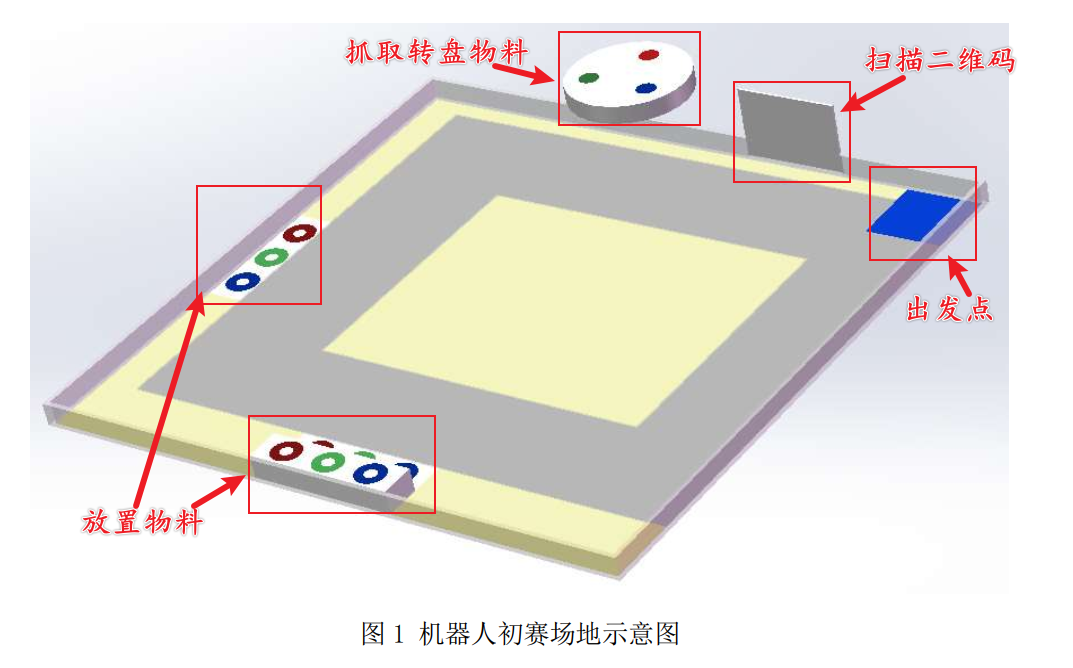
物流的比赛过程大致如下:
- 放置到出发点,一键启动物流小车。
- 扫描并读取二维码,获取物料顺序信息。
- 物流小车根据二维码信息,完成物流搬运任务。
功能方案¶
根据比赛要求可以分为三个技术方向:
- 小车底盘,控制小车移动到指定位置,要非常精确,不然物料抓不到。
- 机械臂,设计一款机械臂抓取物料。
- 视觉:视觉是很重要的一环,需要:扫描二维码、识别物料颜色、辅助底盘视觉定位。
这个比赛合理分工很重要,像我校赛技术方面一个人负责,说实话挺累的。可以根据以上三个技术方面做一个分工,留一个人写文档。
底盘:¶
轮子是麦克纳姆轮或全向轮,两种轮子都可以进行多方向自由移动,推荐 使用 麦克纳姆轮 ,好上手,也是我们学校同学都使用的方案。


电机选择,直流减速电机和步进电机,推荐 直流减速电机 即可,配合PID算法做闭环控制。选择减速电机要注意一个参数:减速比 ,30即可不要太低和太高。

开发板选择,推荐stm32和arduino,有基础可以使用stm32,学习起来可能难一些;arduino相对简单很多。
stm32可以选用 stm32f103c8t6 和 stm32f103ZET6 两种芯片,满足四个编码器的定时器需求,可以挂载多个外设,引脚够用。不推荐购买学习板,买一个小一些资源够用的板子就可以,有能力用PCB画一个外设拓展板,比用杜邦线连来连去可靠很多。
arduino选型就简单很多,怕资源不够就用 arduino mega ,或者 arduino uno ,资源少一些。

机械臂:¶
机械臂比赛使用的分三类
1.六自由度舵机机械臂
基本机构大差不差,有一些同学会对机械进行简单改造,第一个自由度舵机最后用一个扭矩大一些防止突然烧坏。同时机械爪部分最后自己设计,根据物料和自己设计的机械臂运动方式。

2.四自由度

3.两自由度步进电机机械臂
这种都是自己3D打印设计
1、2方案都需要多个舵机,建议买一个舵机拓展板

视觉¶
视觉采用openmv或者工控机搭配opencv,工控机可以用树莓派。推荐 openmv 即可,上手简单。

硬件方案都是其次的,重要的是定位算法和机械臂路径规划的准确性。
注意事项¶



生活垃圾分类¶
赛项简介¶
作品要求:¶
这一部分是对作品功能的总体概括,看看就行,重点都已经加深标注了。需要注意的就是分类标签、压缩装置,后面会详细说明。

功能要求:¶
这一部分是最重要的,涵盖了我们作品最后的功能
- 作品顶部,固定投放口(初赛130x130,决赛现场公布)。
- 由 一个人 将垃圾放入投放口。作品 自动识别分类 至垃圾桶。
- 可回收垃圾需要 压缩装置 ,且必须在全部垃圾分类任务完成前完成。
- 高亮显示屏,可以播放宣传视频,显示投放垃圾的信息、满载情况。
- 待机 时 循环播放 宣传视频。

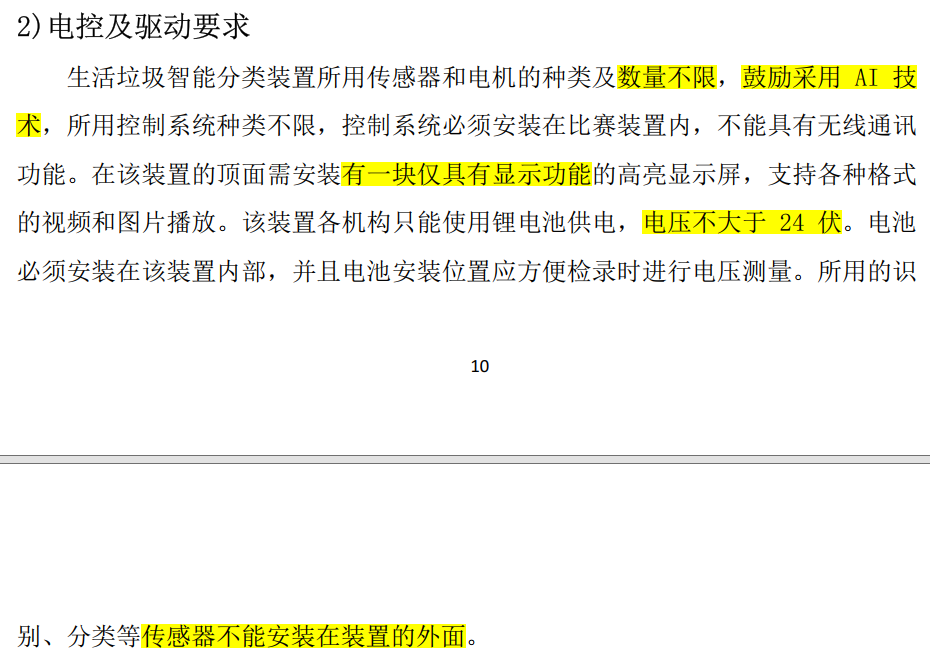
驱动要求:¶
注意电压要求,不大于24伏,我们国赛因为高了0.03V没有给成绩排序😭😭😭(这里不吐槽了,刘老师比赛前肯定会嘱咐你们的,不要报有侥幸心理,严格按照规则)。
机械结构要求:¶
这里不用被自主设计吓到,只要不是整理全买的成品就行,能用3D打印就用,毕竟经费有限哈哈哈。

外形尺寸要求:¶
作品制作时一定要考虑高度,特别是校赛,因为后面要考虑决赛的多种垃圾分类,肯定会或多或少加高。

投放的物料:
物料这里不细说,后面的程序部分会详细说,我们国赛也是踩了坑的。

生活垃圾分类赛道最重要的除了视觉方面就是结构搭建方面,最耗时间的也是结构设计和搭建,搭建以后调试程序就是很方便和快乐的。
上诉为 2023 年的比赛说明文档,每年文档差的不多,但一定以自己 当下文档为标准 制作作品,特别是 尺寸要求 ,一点都不能超过。
人员分工¶
人员分工很重要,这里特别说明团队中 不要有混子 ,我是深有体会的。校赛期间是我和一位朋友两个人参赛的,一开始4个人因为态度消极沟通后踢了两个,后面我负责技术部分,另一位同学负责文档和器件购买等工作,最后通宵好几天才完成作品。还要一组时一个人干的校赛,后面进国赛了,也是很强哈哈哈👍👍👍。废话不多说了,下面说四个人分工,也是理想状态的四个人的定位:
- 机械结构设计,负责作品整体得结构设计,包括材料选择、分类方式、投放口、压缩装置、外观等等,当然很多需要讨论商量,最后主要由这位同学和组长敲定即可。
- 控制结构设计,负责分类装置得控制部分,根据敲定得分类方式进行控制设计,主要包括满载、翻斗运动、机械臂运动等,需要最后和视觉同学一起调试作品。
- 视觉结构,负责目标检测模型、视觉方案选择,这部分很重要,没有视觉其他部分都是0,一分拿不到的。
- 文档和材料购买,我们学校报销采用代付方式,需要整理发票,所以发票在一个人手里很方便,另外就是文档书写,通常要由5千字以上比较好。
当然以上时理想中的人员分工,实时上很难找的满足以上能力的人,所以需要个别能力强的成员多负责一部分内容。我们当时市赛及国赛的分工是:
- 我,负责视觉模型训练、机械结构设计,部分结构选型。市赛结构除分类方式大体最后沿用我校赛设计内容,所以校赛以后的机械结构部分由控制结构的同学承担了很多。
- 雷同学,负责控制结构设计,控制程序、决赛机械臂结构设计、部分机械结构设计。
- 毛同学,负责文档书写。
- 龙同学,负责模型训练的照片标注,激光切割,材料购买等。
在我看来我们的分工也是比较合理的,我和雷同学分担了机械结构设计部分,这样为我们程序调试也提供一定便利。
⚠还是建议机械结构尽量单独找一个同学,写程序以外负责机械结构设计,会一定程度拖慢程序进度,且结构设计真的很烦,特别对我这种不喜欢做机械结构的人哈哈哈哈。