YOLOv8简介
引言¶
随着城市化进程的不断推进,全球范围内机动车数量急剧增加,交通管理和安全问题日益凸显。如何高效、准确地进行车辆检测,成为解决交通拥堵、减少交通事故、提升公共安全的重要手段。传统的交通监控手段,如路口摄像头和人工巡逻,已经无法满足现代城市对实时、高效、智能化交通管理的需求。通过车辆检测技术,可以实现对车辆流量的实时监控,及时发现和处理交通异常情况,从而提高道路通行效率,减少交通事故的发生。近年来,深度学习技术特别是卷积神经网络(CNN)的快速发展,极大地推动了目标检测技术的进步。其中,YOLO(You Only Look Once)系列模型在目标检测具备极高的使用率和高精度检测能力。经过YOLO版本的不断迭代和升级,已经到yolov8版本,具备分类、检测、分割、追踪、姿态等功能,同时具有更好的准确性和快速性。
YOLOV8网络介绍¶
YOLOv8是 YOLO 系列的最新版本,在准确性和速度方面提供了尖端性能。基于以前 YOLO 版本的改进,YOLOv8引入了新的特性和优化,使其成为广泛应用中各种目标检测任务的理想选择。🔺主要包括高级骨干和颈部架构、无锚点分割 Ultralytics 头部、优化精度-速度权衡、各种预训练模型等。
| 主要特点 | 描述 |
|---|---|
| 高级骨干和颈部架构 | YOLOv8采用了最先进的骨干和颈部架构,提高了特征提取和目标检测性能。 |
| 无锚点分割 Ultralytics 头部 | YOLOv8采用了无锚分离超声头,与基于锚的方法相比,有助于提高准确性和更有效的检测过程。 |
| 优化精度-速度权衡 | YOLOv8专注于保持精度和速度之间的最佳平衡,适用于不同应用领域的实时目标检测任务。 |
| 各种预训练模型 | YOLOv8提供了一系列预训练模型,以满足各种任务和性能需求,使您更容易为特定用例找到合适的模型。 |
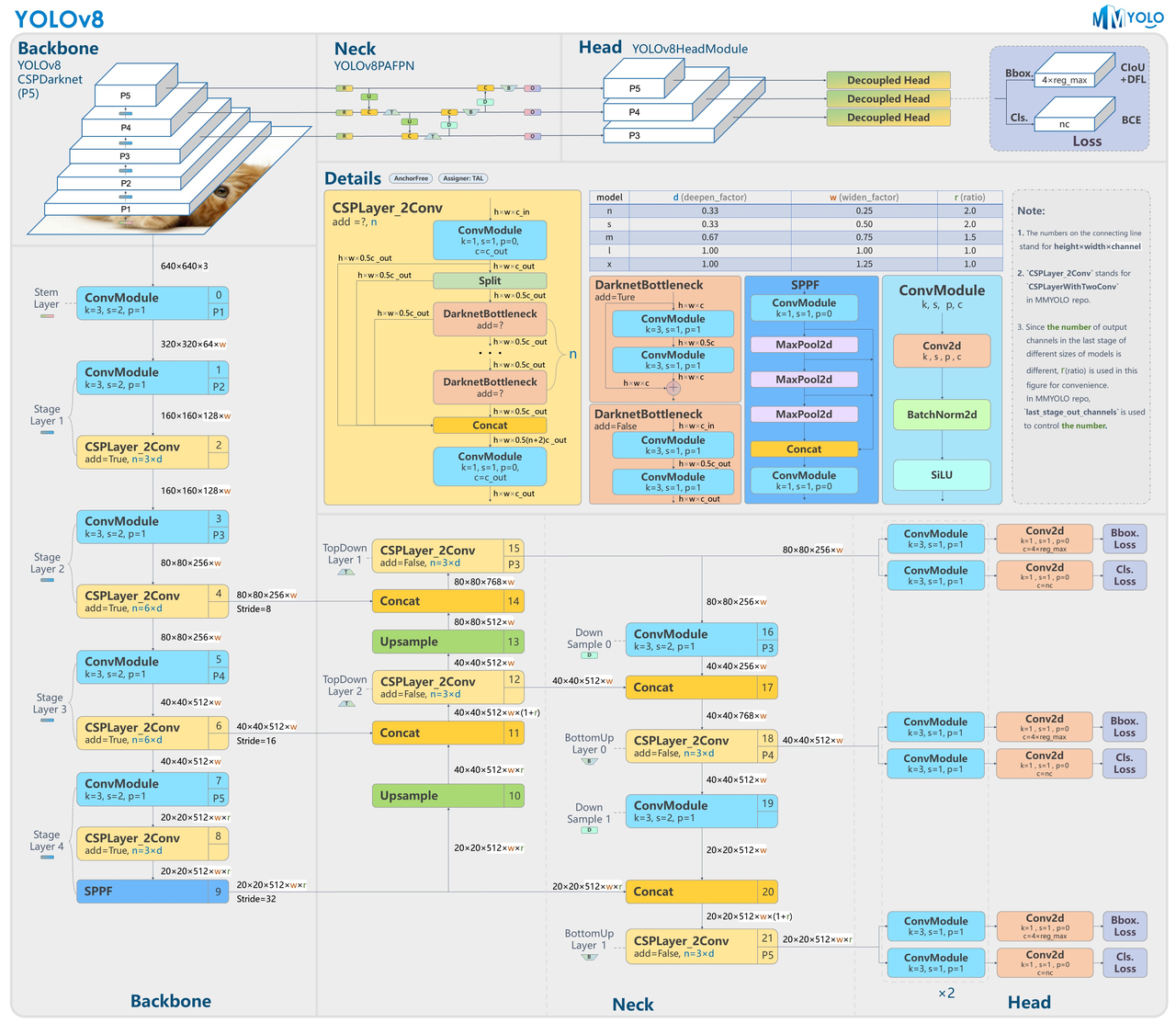
YOLOv8模型主要由四个部分组成,分别为输入端、主干网络、颈部和检测头。YOLOv8输入端采用自适应缩放策略,在缩放输入图片时能够自适应地添加最少的补充边,从而减少冗余信息,对实际车辆检测任务中不同大小的输入图片具有较强的适应性。YOLOv8主干特征提取网络采用一系列卷积层来提取图像特征,同时采用了瓶颈结构和残差连接来降低模型大小和提高网络性能。该部分由C2f、CBS、SPPF三种模块构成。与YOLOv5的C3模块相比,C2f模块参数量更少、特征提取能力更强。在特征融合的颈部,YOLOv8相比YOLOv5减去了两个卷积连接层,沿用了YOLOv5的PAN-FPN结构,通过自顶向下和自底向上的双向跨层连接,进行多尺度的特征融合。🔺