第三章 定时中断
3.1 Timer定时器简介¶
参考资料:江协科技B站视频
3.1.1 定时器简介¶
- TIM(Timer)定时器
- 定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断
- 16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时
- 不仅具备基本的定时中断功能,而且还包含内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等多种功能
- 根据复杂度和应用场景分为了高级定时器、通用定时器、基本定时器三种类型
定时器类型
| 类型 | 编号 | 总线 | 功能 |
|---|---|---|---|
| 高级定时器 | TIM1、TIM8 | APB2 | 拥有通用定时器全部功能,并额外具有重复计数器、死区生成、互补输出、刹车输入等功能 |
| 通用定时器 | TIM2、TIM3、TIM4、TIM5 | APB1 | 拥有基本定时器全部功能,并额外具有内外时钟源选择、输入捕获、输出比较、编码器接口、主从触发模式等功能 |
| 基本定时器 | TIM6、TIM7 | APB1 | 拥有定时中断、主模式触发DAC的功能 |
不同的芯片拥有的定时器资源不同,例如STM32F103C8T6定时器资源:TIM1、TIM2、TIM3、TIM4
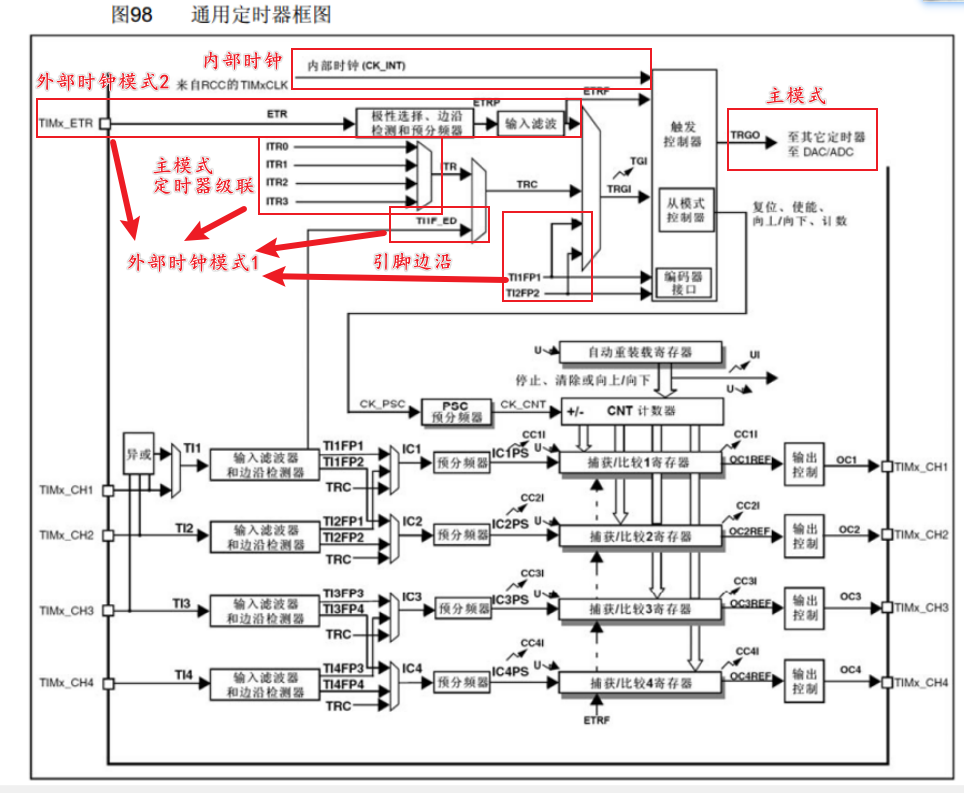
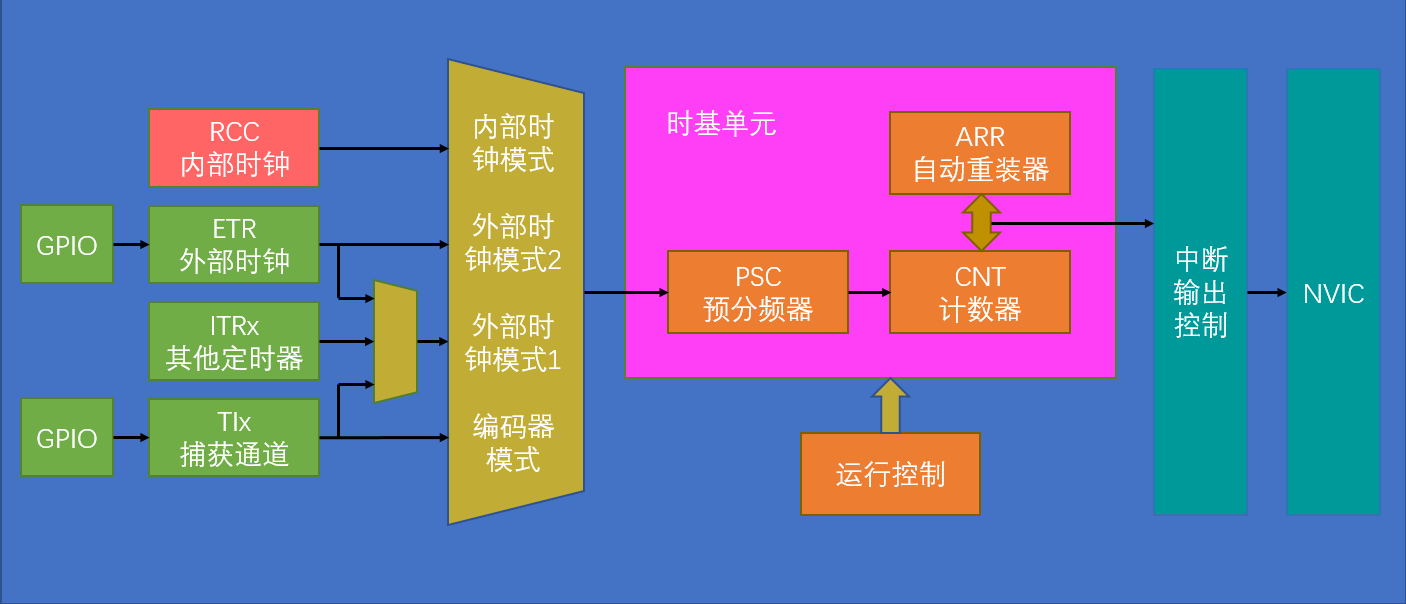
3.1.2 定时器框图¶
基本定时器
时基单元 基本参数
- PSC (预分频器),对输入的频率提前进行分频操作。
需要注意的是当预分频的值为 0 时,即对频率除 2 ,以此类推。
- CNT (计数器),计数器为16位,可以从 0 ~ 65535 计数。
- ARR (自动重装值) ,也成为 “ 计数周期 ” ,当计数器达到 ” 自动重装值 ” 以后触发更新清零,然后产生 中断 或 事件 。
这里产生的中断即 “ 更新中断 ”,后续配置好 NVIC 和 定时中断函数就可以进行中断任务。而事件即 “ 更新事件 ” 则不会触发中断,但可以触发内部其他电路工作。
简单提一下主从触发模式中的主模式自动触发DAC原理:
主模式可以将定时的 “ 更新事件 ” 映射到TRGO引脚,然后TRGO接到DAC的触发转换引脚。这样就完成了定时自动触发DAC而不需要中断触发DAC。

⚠:--基本定时器仅支持向上计数--时钟选择也仅支持内部时钟,为72MHZ
通用定时器
通用定时器的时钟源有多种选择
内部时钟最为常用,外部时钟首选外部时钟模式2。
- 内部时钟 (CK_INT)
- 外部时钟 1 (触发源有多种,具体可以看下图)
外部时钟 1 的触发源可以为:
- TIMx_ETR引脚
- ITR 0-3 (连接的为定时器,详情可看官方参考手册)
- TIMx_CH1的边沿 (即图中的TI1F_ED)
- TIMx_CH1 (即图中的TI1FP1)
- TIMx_CH2 (即图中的TI2FP2)
更多详细的这部分内容会在输入捕获介绍,先简单了解
- 外部时钟模式 2 (TIMx_ETR 外部触发输入)
高级定时器

3.1.3 STM32CubeMX参数¶
参数很多,与上一节定时器框图对应,主从模式、输入捕获等可后续章节学习,先简单了解。

三个参数:
-
Slave mode :从模式,在输入捕获章节配置 主从触发模式 会用到;也可以选择配置为 外部时钟 1 。
- External Clock Mode 1
- Reset Mode
- Gated Mode
- Trigger Mode
Reset Mode、Gated Mode、Trigger Mode在输入捕获章节介绍,暂时知道是和输入捕获相关即可。
-
Trigger mode :触发模式,用于配置 主从触发模式 或 外部时钟 1 的触发源。
- ITR0
- ITR1
- ITR2
- ITR3
- ETR1(TIMx_ETR引脚)
- T1_ED
- T1FP1
- TI2FP2
可以看出与上一节所说的参数一致,由于很少用外部时钟 1 ,所以触发源更多在主从触发模式使用,故在输入捕获章节介绍,暂时知道是和输入捕获相关即可。
-
Clock mode :时钟源,可以选择 内部时钟 和 外部触发输入 。
- Internal Clock
- ETR2(TIMx_ETR引脚)
3.2 定时中断¶
3.2.1 定时中断结构¶
3.2.2 计数频率计算¶
Note
例1:时钟频率为 72 MHZ,预分频器Prescaler为 7199,则定时器计数频率为 10000HZ,也就是每 0.0001s 记 1 个数。
若是自动重装值ARR为 1000 ,那么便是每 0.1s 生成一个 “ 更新中断 ”。
Note
例2:为什么说在72MHz计数时钟下可以实现最大59.65s的定时?
首先要是的Prescaler和ARR的值都是16位的,所以最大为 65536-1=65535
3.2.3 STM32CubeMX配置¶
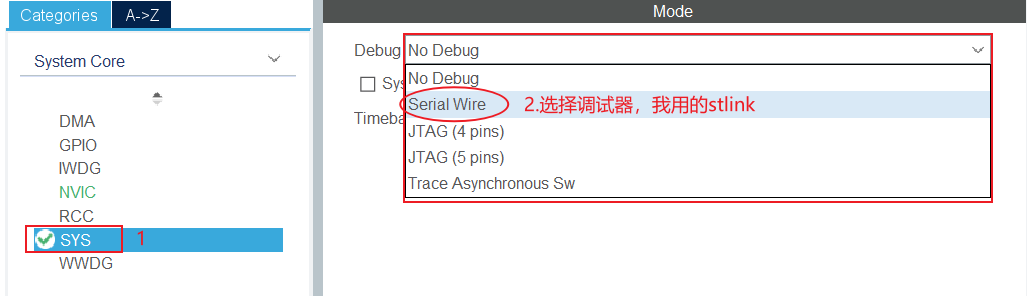
1. SYS配置¶

2. RCC配置¶

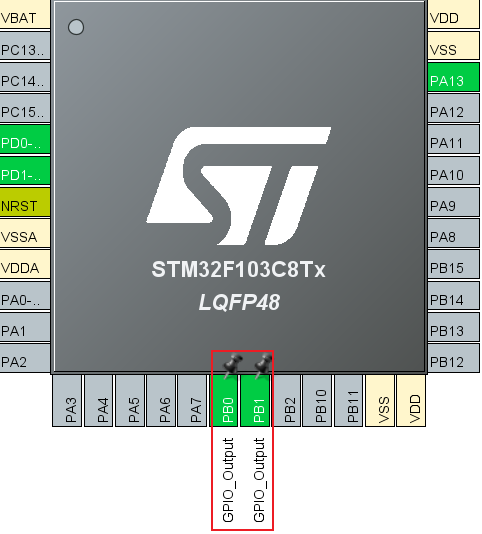
3. GPIO配置¶
配置PB0和PB1为输出模式

4. 定时器配置¶

auto-reload-preload :定时器的预加载机制是否开启,即允许在计数器到达最大值之前,提前将新的值加载到 ARR 寄存器中,以便下一个计数周期可以使用新的自动重载值。这种机制可以避免定时器在溢出事件发生时出现不必要的延迟,确保定时准确度打开即可。


3.2.4 工程代码编写¶
完成配置以后,可以在stm32f1xx_it.c文件找到TIM2_IRQHandler函数
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
总览一下中断处理函数:HAL_TIM_IRQHandler(&htim2);这里包含了所以的定时器更新中断和事件处理内容,比如输出比较、输入捕获、定时中断等。
void HAL_TIM_IRQHandler(TIM_HandleTypeDef *htim)
{
uint32_t itsource = htim->Instance->DIER;
uint32_t itflag = htim->Instance->SR;
/* 捕获/比较通道 1 */
if ((itflag & (TIM_FLAG_CC1)) == (TIM_FLAG_CC1)) {...}
/* 捕获/比较通道 2 */
if ((itflag & (TIM_FLAG_CC2)) == (TIM_FLAG_CC2)) {...}
/* 捕获/比较通道 3 */
if ((itflag & (TIM_FLAG_CC3)) == (TIM_FLAG_CC3)) {...}
/* 捕获/比较通道 4 */
if ((itflag & (TIM_FLAG_CC4)) == (TIM_FLAG_CC4)) {...}
/* 定时器更新事件 */
if ((itflag & (TIM_FLAG_UPDATE)) == (TIM_FLAG_UPDATE)) {...}
/* Break 输入事件 */
if ((itflag & (TIM_FLAG_BREAK)) == (TIM_FLAG_BREAK)) {...}
/* 触发事件 */
if ((itflag & (TIM_FLAG_TRIGGER)) == (TIM_FLAG_TRIGGER)) {...}
/* 通讯事件 */
if ((itflag & (TIM_FLAG_COM)) == (TIM_FLAG_COM)) {...}
}
函数内容很多,我们现只关注定时中断内容,即 定时器更新事件 部分的代码,具体如下 :
/* TIM Update event */
if ((itflag & (TIM_FLAG_UPDATE)) == (TIM_FLAG_UPDATE))
{
if ((itsource & (TIM_IT_UPDATE)) == (TIM_IT_UPDATE))
{
// 清除更新中断标志
__HAL_TIM_CLEAR_FLAG(htim, TIM_FLAG_UPDATE);
// 调用定时器更新回调函数
#if (USE_HAL_TIM_REGISTER_CALLBACKS == 1)
htim->PeriodElapsedCallback(htim); // 用户自定义的回调函数
#else
HAL_TIM_PeriodElapsedCallback(htim); // 默认回调函数
#endif
}
}
重要函数和参数介绍,了解即可:
TIM_FLAG_UPDATE /* 更新中断标志位 */
TIM_IT_UPDATE /* 更新中断是否使能 */
__HAL_TIM_CLEAR_FLAG(htim, TIM_FLAG_UPDATE) /* 清除中断标志位 */
USE_HAL_TIM_REGISTER_CALLBACKS /* 判断用户是否重写了HAL_TIM_PeriodElapsedCallback(htim)函数 */
htim->PeriodElapsedCallback(htim) /* 用户自定义中断函数 */
HAL_TIM_PeriodElapsedCallback(htim) /* 默认函数 */
完成自己的中断服务,我们需要在stm32f1xx_it.c文件中重写中断处理函数HAL_TIM_PeriodElapsedCallback,示例如下:
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
static unsigned char ledState = 0;
if (htim == (&htim2))
{
if (ledState == 0)
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
ledState = !ledState;
}
}
/* USER CODE END 1 */
最后在main.c文件上方 使能TIM2 ,中断中的内容就可以实现:
Note
htim2是在tim.h上方定义的