第七章 参数通信
7.1 参数通信¶
在 ROS2 中参数被视为节点的设置,而参数通信机制是基于服务通信实现的。
① 打开一个小海龟模拟器窗口

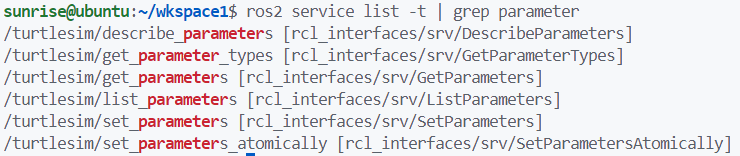
② 查看带有parameter的服务,这些是与参数相关的服务,提供参数的查询与设置
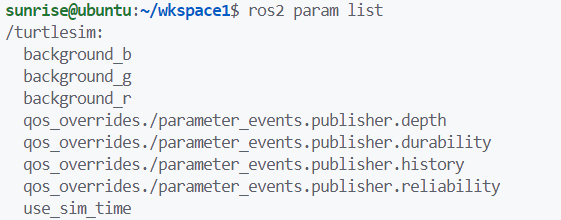
③ 查看参数列表,其中背景相关三个参数是显示声明的,其余是默认参数
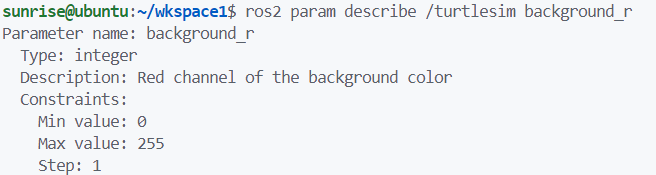
④ 查看参数的具体描述
⑤ 获取当前节点的参数值

⑥ 修改参数值

⑦ 将参数导出为yaml文件,以便修改多个参数
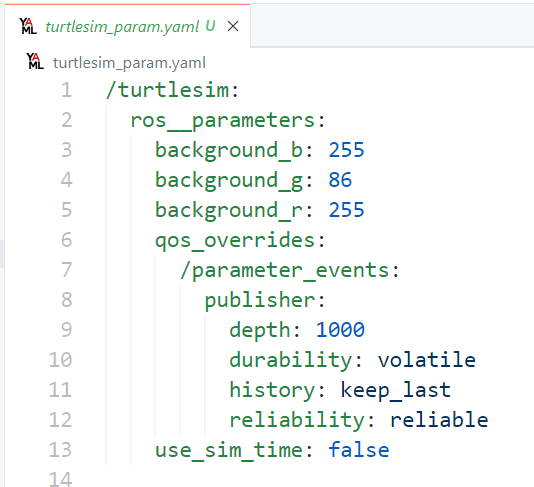
直接修改yaml文件,然后下次运行时带上该文件

7.2 Python参数服务¶
7.2.1 参数声明与设置¶
修改detect_service_py/detect_service_py/detect_service.py,使用参数声明:
Python
class FaceDetectService(Node):
def __init__(self, name):
super().__init__(name)
# ... #
"""添加参数声明"""
# 检测参数(未使用参数通信)
# self.upsample_times = 1
# self.model = "hog"
# 声明参数
self.declare_parameter("face_locations_upsample_times", 1)
self.declare_parameter("face_locations_model", "hog")
# 设置参数
self.upsample_times = self.get_parameter("face_locations_upsample_times").value
self.model = self.get_parameter("face_locations_model").value
重新编译运行节点以后,就可以查看参数已经识别:

可以在启动节点时使用参数,加上--ros-args -p:
7.2.2 订阅参数更新¶
在命令行、其他节点修改过参数后,需要同时修改属性赋值。此时需要添加一个参数回调函数:
Python
from rcl_interfaces.msg import SetParametersResult
class FaceDetectService(Node):
def __init__(self, name):
super().__init__(name)
# ... #
# 添加参数回调函数
self.add_on_set_parameters_callback(self.parameters_callback)
def parameters_callback(self, parameters):
for parameter in parameters:
self.get_logger().info(f"参数{parameter.name}被设置为{parameter.value}")
if parameter.name == "face_locations_upsample_times":
self.upsample_times = self.get_parameter("face_locations_upsample_times").value
elif parameter.name == "face_locations_model":
self.model = self.get_parameter("face_locations_model").value
return SetParametersResult(successful=True)
编译运行
另一个终端,修改参数
修改结果

7.2.3 修改其他节点的参数¶
修改其他节点的参数,需要用到服务通信发送请求,原因看下图,当我们运行服务端时,有很多关于参数的服务,其中我们就需要使用/face_detect/set_parameters服务设置参数。
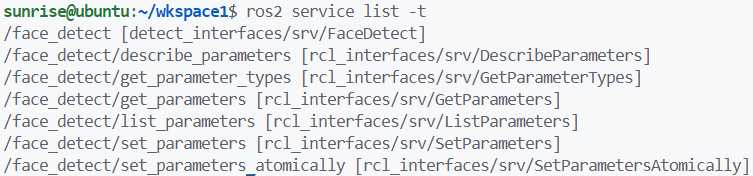
查看消息接口内容

修改detect_service_py/detect_service_py/detect_client.py
Python
# 导入设置参数的服务消息接口
from rcl_interfaces.srv import SetParameters
# 导入设置参数的话题消息接口
from rcl_interfaces.msg import Parameter, ParameterValue, SetParametersResult
class FaceDetectService(Node):
def __init__(self, name):
super().__init__(name)
# ... #
def call_set_parameter(self, parameters):
# 1.创建客户端,并等待服务上线
client = self.create_client(SetParameters, "/face_detect/set_parameters")
while client.wait_for_service(timeout_sec=1) is False:
self.get_logger().info("等待服务上线...")
# 2.构造Request(由于消息接口复杂,故消息赋值单开一个函数完成)
request = SetParameters.Request()
request.parameters = parameters
# 3.发送请求并等待服务端处理完成(异步获取结果)
future = client.call_async(request)
rclpy.spin_until_future_complete(self, future=future)
response = future.result()
return response
def update_detect_parameter(self, times=1):
# 1.创建一个参数对象
param = Parameter()
param.name = "face_locations_upsample_times"
# 2.创建参数值对象
param_value = ParameterValue()
# 整数数据
param_value.type = ParameterType.PARAMETER_INTEGER
param_value.integer_value = times
# 3.赋值参数对象
param.value = param_value
# 4.发送更新参数请求
response = self.call_set_parameter([param])
for result in response.results:
if result.successful:
self.get_logger().info(f"参数{param.name}被设置为{times}")
else:
self.get_logger().error(f"参数设置错误{result.reason}")
def main(args=None):
rclpy.init(args=args)
node = FaceDetectClient("face_detect_client")
node.update_detect_parameter(times=1)
node.send_request()
node.update_detect_parameter(times=2)
node.send_request()
rclpy.shutdown()
编译运行
打开服务端
打开客户端
运行结果

7.3 C++参数服务¶
7.3.1 参数声明与设置¶
修改patrol_service_cpp/src/patrol_service.cpp,使用参数声明:
C++
class TurtleController : public rclcpp::Node
{
public:
TurtleController() : Node("turtle_controller")
{
// 声明和设置参数
this->declare_parameter("k", 1.0);
this->declare_parameter("max_speed", 3);
this->get_parameter("k", k_);
this->get_parameter("max_speed", max_speed_);
// ...
}
};
重新编译运行节点以后,就可以查看参数已经识别:

7.3.2 订阅参数更新¶
方法与Python保持一致,API名称有所不同。
C++
class TurtleController : public rclcpp::Node
{
public:
TurtleController() : Node("turtle_controller")
{
// ...
// 添加参数回调函数
this->add_on_set_parameters_callback(
[&] (const std::vector<rclcpp::Parameter> ¶ms) -> SetParametersResult {
for (const auto ¶m : params) {
// 打印日志
RCLCPP_INFO(this->get_logger(), "更新参数 %s 值为:%f",param.get_name().c_str(), param.as_double());
// 判断参数名称
if (param.get_name() == "k") {
k_ = param.as_double();
} else if (param.get_name() == "max_speed") {
max_speed_ = param.as_double();
}
}
// 返回结果
auto result = SetParametersResult();
result.successful = true;
return result;
}
);
}
};
编译运行

7.3.3 修改其他节点的参数¶
修改patrol_service_cpp/src/patrol_client.cpp
C++
#include "rcl_interfaces/msg/parameter.hpp"
#include "rcl_interfaces/msg/parameter_value.hpp"
#include "rcl_interfaces/msg/parameter_type.hpp"
#include "rcl_interfaces/srv/set_parameters.hpp"
using SetParameters = rcl_interfaces::srv::SetParameters;
using Parameter = rcl_interfaces::msg::Parameter;
using ParameterValue = rcl_interfaces::msg::ParameterValue;
class TurtleController : public rclcpp::Node
{
public:
/* 设置参数 */
std::shared_ptr<SetParameters::Response> set_patrol_parameter(
rcl_interfaces::msg::Parameter ¶meters)
{
// 1.创建参数客户端,并等待服务上线
auto param_client = this->create_client<SetParameters>("/turtle_controller/set_parameters");
while(!param_client->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(this->get_logger(), "等待服务被打断。。。");
return;
} else {
RCLCPP_INFO(this->get_logger(), "等待参数服务上线。。。");
}
}
// 2.构造Request(由于消息接口复杂,故消息赋值单开一个函数完成)
auto request = std::make_shared<SetParameters::Request>();
request->parameters.push_back(parameters);
// 3.发送请求并等待服务端处理完成(异步获取结果)
auto future = param_client->async_send_request(request);
rclcpp::spin_until_future_complete(this->get_node_base_interface(), future);
auto response = future.get();
return response;
}
void update_patrol_parameter(double k)
{
// 1.创建一个参数对象
auto param = Parameter();
param.name = "k";
// 2.创建一个参数值对象
auto param_value = ParameterValue();
param_value.type = rcl_interfaces::msg::ParameterType::PARAMETER_DOUBLE;
param_value.double_value = k;
// 3.赋值参数对象
param.value = param_value;
// 4.发送更新参数请求
auto response = this->set_patrol_parameter(param);
if (response == nullptr) {
RCLCPP_WARN(this->get_logger(), "参数修改失败");
return;
} else {
// 循环取出结果,判断successful
for (auto result : response->results) {
if (result.successful) {
RCLCPP_INFO(this->get_logger(), "参数k 已修改为:%f", k);
} else {
RCLCPP_WARN(this->get_logger(), "参数k 失败原因:%s", result.reason.c_str());
}
}
}
}
};
编译运行
先打开小海龟,接着打开服务端,最后打开客户端,参数修改成功:
